技術広報誌ET
ジブクレーン自動運転システムの開発
516号(2025年1月1日) 西日本メカトロニクスセンター 川口 博之はじめに
建設業の労働人口の減少と高齢化が進む中で、クレーンのオペレーターにおいても熟練技能者が減少し、これに伴う安全性や生産性の低下が懸念されています。その対策としてデジタル技術を活用した遠隔運転技術やロボット技術による無人化施工が有効と考えられます。このような状況を踏まえ、鴻池組では機材部門が中心となり、ARAV(株)(東京都文京区)と共同してクレーンの自動運転システムの開発に取り組んでいます(写真-1)。

写真-1 システムを搭載したクレーン
自動運転システムの概要
クレーンに地点Aから地点Bへ吊り荷の移動指令を与えると、一連の動作を計画して自律的に運転を行うシステムを開発しました。
①クレーンおよびその周辺に存在するモノの配置をコンピュータ(PC)上に作り出します。クレーン自身の3Dデータを配置し、周辺環境は3D LiDAR※による計測結果を解析し3Dデータとして2つを組み合わせることで、PC上にデジタルツインを構築します(図-1)。
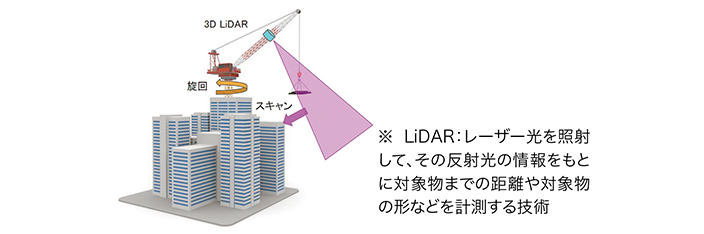
図-1 3D LiDARによる計測イメージ
②目的地点を登録し、地点Aから地点Bへ吊り荷を移動させる指令について、計測した周辺環境データから障害物との離隔距離を設定し、吊り荷が衝突しない動作計画のシミュレーションを行います(図-2)。
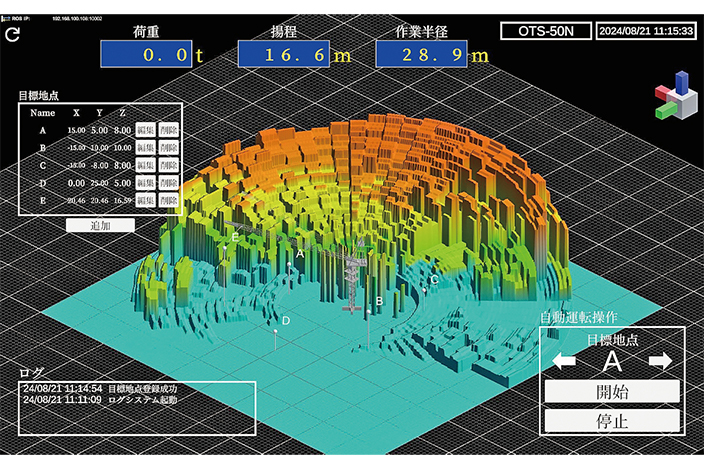
図-2 操作用GUI画面例
③PC上の動作計画シミュレーションに沿って実機が習い運転を行います。クレーンには巻上高さ検知用の揚程センサ(2D LiDAR)、起伏角度検知センサ(ポテンショメータ)、旋回角度検知センサ(エンコーダ)を取り付け、実機の状態がシミュレーションの通りになるように制御を行います(図-3)。
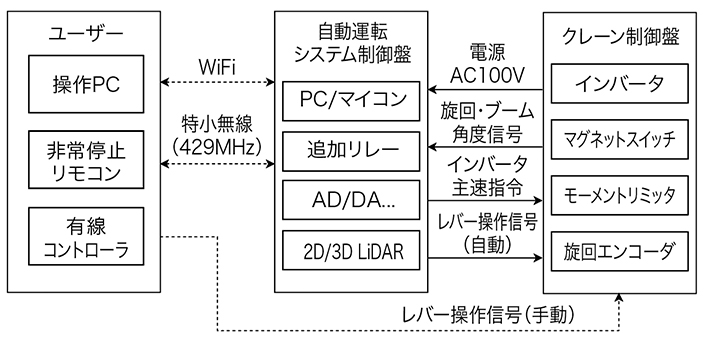
図-3 システムブロック図
自動運転システムの特徴
クレーンオペレーターは、他の作業者と相番作業となる玉掛けと玉外し時の操作を除き、途中の運搬操作は本システムにより自動で行えるようになります。吊荷の状態によって緊急的に停止が必要な場合は、現状オペレーターによるシステムの緊急停止を行いますが、この操作も各種のIoTセンサを用いて自動化を図ることが可能と考えます。なお、本システムは運転操作の制御回路にPCから遠隔で直接介入する方式を採用しています。
おわりに
安全性および生産性の向上を目的として、ジブクレーンの自動運転システムの開発に取り組んでいます。これまでの開発によりクレーンが周辺環境を計測して障害物を特定し、回避計画を立てて吊り荷が障害物との安全な離隔を保ちながら移動する制御システムを構築できました。今後は吊り荷の玉掛けワイヤー長さの推計、敷地形状や作業範囲規制域の設定を機能に追加し、現場での運用に向けて開発を進めてまいります。