ニュース
2025年04月10日 リリース
株式会社鴻池組(本社:大阪市中央区)と株式会社ポケット・クエリーズ(本社:東京都新宿区)は、2025年2月13日、大阪・夢洲の2025年日本国際博覧会施設整備事業小催事場建設工事(施設正式名称:EXPOナショナルデーホール)で、最新の四足歩行ロボット「B2-W」(UNITREE社製)による自律走行実験を行い、安定した走行を実現しました。
背景と経緯
建設業界では、労働力不足への対応と作業員の安全確保が喫緊の課題となっています。とくに建設現場の巡回業務は、段差のある場所での作業も多く、自動化による業務効率化が求められています。そこで鴻池組は、建設現場でも安定して移動できる四足歩行ロボットを導入し実証実験を重ねてまいりました。
内容と成果
今回の実験では、外観に連続したスロープを有する複雑な形状の建物において、四足歩行ロボットの自律走行を検証しました。現場では2024年1月から旧型四足歩行ロボット「B1」を使用していましたが、このたび新たに最新機種「B2-W」によるテスト走行を実施しました。
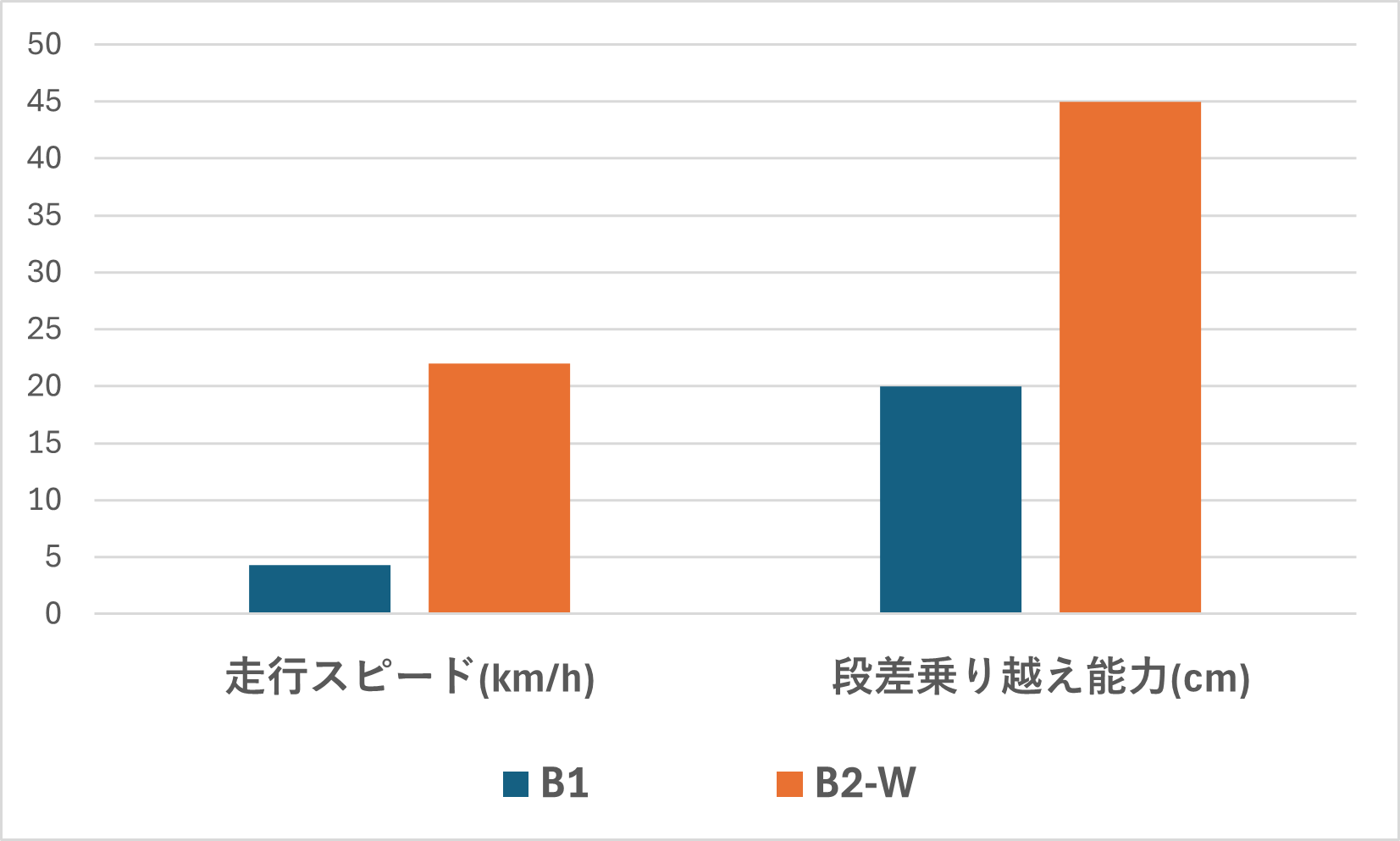
「B2-W」はB1と比較して走行性能が大幅に向上しています。

{kind=link}
現場内の階段における走行テストでは段差の昇降に問題がないことを確認しました。
そして、複雑な形状のスロープにおける走行を通じて、実運用への適応性も実証することができました。
さらに、ポケット・クエリーズと共同でライントレース機能を新規開発しました。これはロボットに搭載された深度カメラ(※)と画像認識技術を活用し、床面に敷設したカラーテープに沿った自律走行が可能とする技術です。現場で初のテスト走行を行い、屋外特有の日照変化が激しい施工条件下においても安定した走行性能が確認できました。
(※)撮影対象までの距離(深度)情報を取得できるカメラ
開発担当者コメント
「この成功は建設現場の省人化への大きな一歩です。今後は、建築現場だけでなく土木現場でも実証実験を重ね、現場内での安全な自律走行の実現に向けた運用方法を確立し、省人化や危険箇所の巡視など、より広範な活用を目指します。」
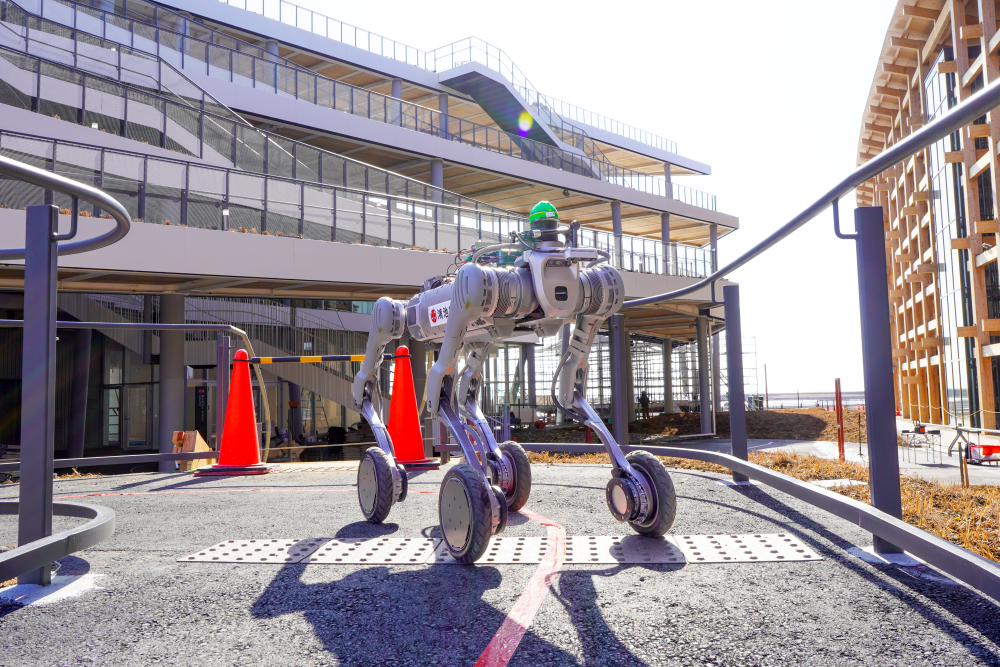 床面に敷設したテープ(ライン)に沿って自律走行する四足歩行ロボット「B2-W」 床面に敷設したテープ(ライン)に沿って自律走行する四足歩行ロボット「B2-W」 |
 四足歩行ロボット搭載のカメラで認識された敷設ライン 四足歩行ロボット搭載のカメラで認識された敷設ライン |