ニュース
2024年12月12日 リリース
株式会社鴻池組(本社 大阪市中央区 代表取締役社長 渡津弘己)と株式会社イクシス(本社 川崎市幸区 代表取締役Co-CEO兼CTO 山崎文敬)は、橋脚の耐震補強工事における表面処理作業を自動化する建設ロボットを共同開発しました。本技術により、人力作業を省略し、作業員の負担軽減と安全性の確保を実現します。
背景と経緯
建設業界では、技能労働者の高齢化や人手不足が深刻な課題となっています。また、危険を伴う作業環境の改善も急務となっています。これらの課題を解決するため、「構造物の長寿命化」「生産性の向上」「安全性確保」を目指し、建設ロボット技術の開発に着手。その第一弾として、橋脚のRC巻立てによる耐震補強工事で実施される表面処理工法に着目し、その工法のひとつであるバキュームブラスト工法を自動で行うロボットを開発しました(写真-1、図-1)。
開発したロボットの概要
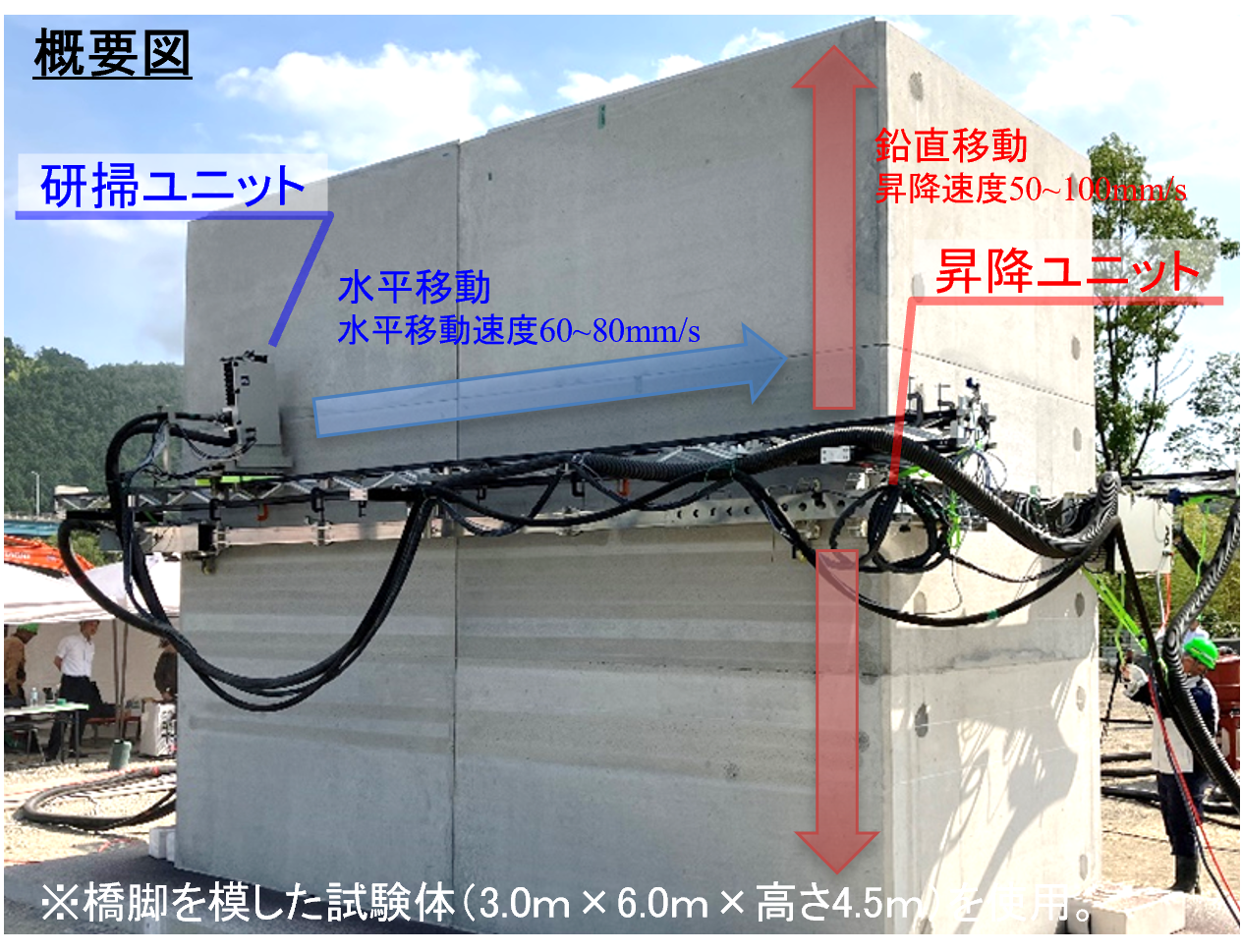
開発したロボットは、橋脚を把持しながら昇降する機能を有する昇降ユニットと、表面処理を行うブラストガンを備えた研掃ユニットで構成されています。
昇降ユニットは、フレームを内蔵エアシリンダーで伸縮させ、4箇所に配置された車輪を構造物に押し付けることで橋脚を把持し、橋脚を50~100mm/sの速度で自律走行します。また、電源や空圧喪失などの不測の事態が発生しても安全装置が働き、落下することはありません。
研掃ユニットに搭載するブラストガンは、大型化により約2倍の研掃能力を付与しています。ブラストガンをユニット上の走行レールに沿って60~80mm/sの速度で水平移動させることで橋脚面に密着させて研掃を行います。ブラストマシンは、ツーノズルハンドブラストマシンを使用し、研掃ユニットを2セット載せることで二面同時研掃が可能です。このロボットにより、作業員数の削減、品質の安定化、粉じん飛散防止、高所作業の解消など、多くのメリットを生み出すことができます。
今後の展望
本技術は、RC橋脚の表面処理に限らず、塗膜除去や調査・点検などインフラ整備・維持管理の様々な場面での活用が期待できます。今後は本技術の現場適用を進めるとともに、さらなる用途開発を図ってまいります。
公開試験を開催
去る12/11(水)、12/12(木)に、鴻池組岸和田機材センターにおいて、RC橋脚を模した実物大試験体を用いた公開試験を行い、国土交通省や道路事業者の方など、2日間で約60名の方に見学していただきました(写真-2)。見学者の皆さんからいただいたご意見を踏まえて課題解決を行い、社会実装へ向けた整備を推進してまいります。

{kind=link}
 写真-2 公開試験の状況 写真-2 公開試験の状況 |
※2024年12月24日(火)追記:画像1の「昇降速度」と「水平移動距離」の数字に誤りがあましたので訂正してお詫び申し上げます。
ニューストップへ